
MuMuTA: «Биогибридная» роботизированная рука, созданная с использованием человеческих клеток
Учёные придумали, как защитить искусственные ткани от некроза — решение оказалось неожиданно гастрономическим.
Биогибридные роботы сочетают в себе биологические компоненты, такие как мышцы, растительные ткани и даже грибы, с небиологическими материалами. Мы уже научились создавать надежные искусственные части, но поддерживать органические компоненты в рабочем состоянии по-прежнему сложно. Именно поэтому роботы, использующие биологические мышцы, остаются небольшими и простыми — не больше пары сантиметров в длину, с одним или двумя движущимися элементами.
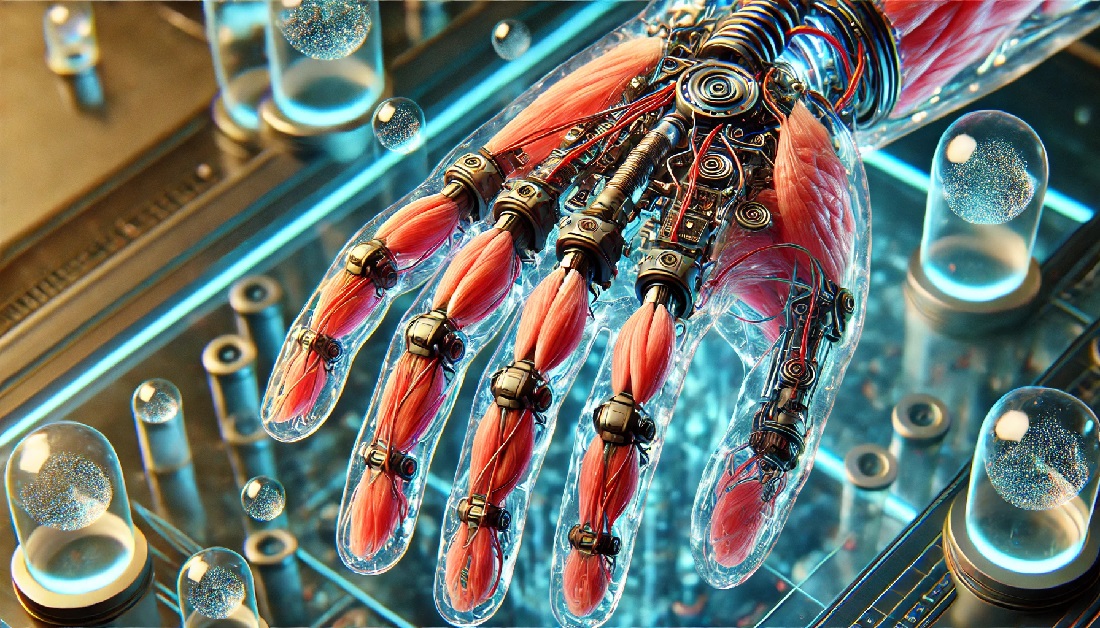
«Увеличение размеров биогибридных роботов — сложная задача из-за слабой сократительной силы лабораторно выращенных мышц, риска некроза в толстых мышечных тканях и трудностей при интеграции биологических приводов с искусственными структурами», — объясняет профессор Токийского университета Сёдзи Такэути. Он и его команда разработали полноразмерную биогибридную руку длиной 18 сантиметров, в которой все пять пальцев работают на выращенных в лаборатории человеческих мышцах.
Проблема выживания
Одной из главных трудностей при создании крупных биогибридных роботов остаётся некроз — отмирание клеток из-за нехватки кислорода и питательных веществ. В лабораторных условиях мышцы выращиваются на питательной среде, которая снабжает их всем необходимым. Пока ткани остаются тонкими и плоскими, проблема отсутствует — каждая клетка получает достаточно кислорода.
Но как только мышцы становятся толще и мощнее, клетки в глубине теряют доступ к питательным веществам и погибают. В живых организмах эту задачу решает система кровеносных сосудов, но в искусственно выращенных тканях её пока создать не удаётся. Такэути и его команда нашли обходное решение — «суши-рулоны».
Исследователи начали с выращивания тонких мышечных волокон, уложенных рядом на чашке Петри. Это позволило им получать кислород и оставаться здоровыми. Когда мышцы достигли нужного размера, их свернули в цилиндрические структуры, названные MuMuTA (multiple muscle tissue actuators — многослойные мышечные приводы). «MuMuTA создавались из тонких мышечных слоёв, свернутых в цилиндры, что улучшало их сократительную способность и позволяло кислороду проникать внутрь», — объясняет Такэути.
Движение в MuMuTA запускалось с помощью электрических импульсов, подаваемых через электроды на концах. В зависимости от того, какие волокна сокращались, такие «мышечные роллы» могли сгибаться или вращаться. Интенсивность сокращения контролировалась изменением напряжения.
После успешных испытаний MuMuTA исследователи использовали их для управления пальцами биогибридной руки.
Камень, ножницы, бумага
Рука была напечатана на 3D-принтере из пластика и подвешена в жидкой среде. Каждый палец состоял из трёх суставов, а управление осуществлялось с помощью тросов, соединённых с MuMuTA, которые располагались в предплечье. Чтобы минимизировать влияние электрических полей, приводы поместили в стеклянные контейнеры, а затем прикрепили к пластиковому каркасу.
Когда исследователи сокращали разные MuMuTA, рука могла выполнять различные жесты, включая знаки из игры «камень, ножницы, бумага», а также удерживать предметы, например пипетку. Главным преимуществом MuMuTA оказалась их сила: каждый привод развивал 8 миллиньютонов — этого достаточно, чтобы поднять скрепку. Кроме того, мышцы можно было разворачивать после использования, обеспечивая им доступ к кислороду и питательным веществам, что продлевало срок их службы.
Но без недостатков не обошлось. Во-первых, пальцы могли сгибаться только в одну сторону — мышцы сокращались, но для возвращения в исходное положение приходилось полагаться на плавучесть материала. В человеческой руке этот вопрос решён антагонистическими мышцами, работающими попарно. Такэути предложил два варианта решения: использование эластичных материалов в суставах для упругого возврата или добавление пяти дополнительных MuMuTA для двустороннего движения.
Вторая проблема — рука могла работать только в жидкой среде. Для того чтобы перевести её в сухие условия, потребуется создать искусственную систему подачи питательных веществ и защитные структуры для поддержания жизнеспособности тканей.
Но самой очевидной нерешённой проблемой биомышц остаётся усталость.
Биогибридные роботы нуждаются в тренировках
Во время испытаний выяснилось, что при интенсивной нагрузке сила сокращения MuMuTA снижалась уже через несколько минут. После 10 минут работы мышцы уставали, а восстановление занимало около часа. При этом в лаборатории эти ткани не испытывали и близко таких нагрузок, как настоящие человеческие мышцы.
Максимальная удельная сила сокращения, достигнутая в эксперименте, составила 0,7 миллиньютонов на квадратный миллиметр — это хороший показатель для лабораторных мышц, но всего лишь около 12% от показателей живых тканей (6 миллиньютонов на квадратный миллиметр).
Такэути считает, что решением может стать физическая тренировка. «Как и натуральные мышцы, искусственные могут улучшать выносливость и силу при регулярных упражнениях», — предполагает он.
Другой вариант — использование химических факторов роста для усиления сокращений. Это уже больше похоже на «допинг» для биогибридных мышц.
Работа Такэути и его команды опубликована в журнале Science Robotics: http://dx.doi.org/10.1126/scirobotics.adr5512